如何创建Microsoft Word文档
Microsoft Word是工作还有学习都会使用到的一款文字处理软件,提供的功能非常的全面,拥有各种工具以及功能都可以带来便捷的操作,我们还可以在软件建、编辑和格式化文档。用户可以使用各种字体、颜色和样式来定制文档,同时还可以插入图片、表格和图表等元素,使文档更加生动和具有吸引力。Microsoft Word 还具有自动纠错和排版功能,使文档更加规范和易读。至于如何在Microsoft Word文档创建自己需要的文档其实也很简单,不会的可以看看下面的步骤
从事过电源开发的工程师都接触过CCM、DCM、BCM这几个词汇,也能大致了解其含义,但是对于这几个概念的由来,和为什么要搞清楚这几个概念往往还是模糊的。
以图1.13所示的Buck电路图为例,说明电源的工作模式。为了简单的说明电源的工作模式,用仿真软件模拟一个Buck电路用于展示几种工作模式的情况。
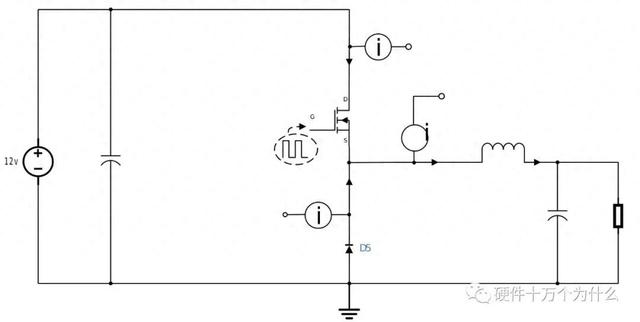
图 1.13 Buck电路图
图1.13中,输入电压是12V,输入电容是33μF。控制脉冲的电压是12V,上升时间500ns,下降时间500ns,脉宽4μs,周期10μs。输出电感是3.3μH。输出电容是100μF。
(1)CCM、DCM、BCM的定义:
CCM (ContinuoμsConduction Mode),连续导通模式:在一个开关周期内,电感电流从不会达到0A。或者说电感从不“复位”,意味着在开关周期内电感磁通从不会到0,功率管闭合时,线圈中还有电流流过。CCM模式电感电流波形如图1.14所示。
图 1.14 CCM模式电感电流波形图
DCM,(Discontinuoμs Conduction Mode)非连续导通模式:在开关周期内,电感电流总会到0,意味着电感被适当地“复位”,即功率开关闭合时,电感电流为零。DCM模式电感电流波形如图1.15所示。
图 1.15 DCM模式电感电流波形图
BCM(Boundary Conduction Mode),边界或边界线导通模式:控制器监控电感电流,一旦检测到电流等于0,功率开关立即闭合。控制器总是等电感电流“复位”来激活开关。如果电感值电流高,而截至斜坡相当平,则开关周期延长,因此,BCM变化器是可变频率系统。BCM变换器可以称为临界导通模式或CRM(Critical Conduction Mode)。BCM模式电感电流波形如图1.16所示。
图 1.16 BCM模式电感电流波形图
将三种模式下电感电流的波形放在一起对比,如图1.17所示。
图 1.17三种工作模式的电感电流图
(3)三种工作模式的特点:
以图1.18所示的非同步Buck电路为例,来说明三种工作模式的特点。
图 1.18非同步Buck电路图
为了说明问题,我们只在仿真电路上修改了负载为2Ω,增加电流I,使其更大,这样电感电流是基于I进行变化的,纹波电流与0A距离更远。非同步Buck电路仿真图如图1.19所示。
图 1.19非同步Buck电路仿真图
图1.19中的输出电流为
输出电流由负载决定,电感电流纹波与负载无关,电感电流为
开关点电压和电感电流仿真波形如图1.20所示。图中,绿色为IL电感电流,紫色为开关节点(SW)电压。
图 1.20开关节点(SW)电压和电感电流仿真波形图
非同步控制器的降压变换器Buck工作于CCM,会带来附加损耗。因为续流二极管反向恢复电荷需要时间来消耗,这对于功率开关管而言,是附加的损耗负担。
BCM是一种特殊的CCM,它的电感的电流最小值为0。此时我们把负载调为3.6Ω,这样让纹波电流压着0A,形成一个临界的状态。BCM模式仿真电路图如图1.21所示。
图 1.21 BCM模式仿真电路图
输出电流为
输出电流由负载决定,电感电流纹波与负载无关,电感电流纹波为
BCM模式开关点电压和电感电流仿真波形如图1.22所示。
图 1.22 BCM模式开关点电压和电感电流仿真波形图
以非同步BUCK的DCM模式为例。如果把负载调小,也就是IL电源的输出电流变小了。相当于上面的纹波电流继续往下移动,穿过0A的坐标线。由于二极管的正向导通性,上管关闭。所以电感上的电流不会出现负数(我们设定输出方向为正方向)。此时就会出现电感上电流为0。DCM模式仿真电路图如图1.23所示。
图 1.23 DCM模式仿真电路图
图1.23中,输出电流为
式中R继续增大,直到
电感电流纹波
式中
DCM模式开关点电压和电感电流仿真图如图1.24所示,黄色为电感电流,蓝色为Vsw电压
图 1.24 DCM模式开关点电压和电感电流仿真波形图
(4)CCM与DCM比较:
①DCM能降低功耗的,DCM模式的转换效率更高些;
②工作于DCM模式,会产生振荡现象,其频谱更复杂;
③工作于CCM模式,输出电压与负载电流无关。
④工作于DCM模式,输出电压受负载影响,为了控制电压恒定,占空比必须随着负载电流的变化而变化。
对于上述电源中,由于二极管不可能产生反向电流,所以当电流接等于0之后,二极管不再进行续流。但是对于有的电源用MOSFET替代二极管,可能会继续保持CCM状态,有可能产生负电流,也可能这里增加电流检测,让电源进入DCM状态。
DCM模式的时候,由于频谱更丰富,会导致难以掌控的EMI问题,并且可能由于音频信号的产生会导致电感的啸叫。
5.1Boost电路的CCM模式与DCM模式
Boost升压电路,可以工作在电流断续工作模式(DCM)和电流连续工作模式(CCM)。CCM工作模式适合大功率输出电路,电感电流需保持连续状态。因此,我们按CCM工作模式来对Boost电路进行分析。不管哪种拓扑,其CCM和DCM的定义是一样的。
根据变换器稳定状态下每个开关周期起始 (结束)时电感电流的实际值,可以判断变换器的工作模式:
▪ 稳定状态下若每个周期中电流都回到零,则为断续导电模式 (DCM);
▪ 若电流回到大于0的值,则称为连续导电模式 (CCM);
▪ 若恰好在周期结束时回到零,则称为临界连续模式 (BCM)。
我们根据前文分析,可以知道,电感上的平均电流其实是由负载决定的,因为输出电压一定,负载的等效电阻越小,则电感上流经的平均电流IL(avg)就越大;电感上的纹波电流在输入输出电压确定的情况下,跟电感值的大小有关。当平均电流足够大的时候,电感的电流处于一个稳态,持续以纹波的形式围绕平均电流变化。当负载变化时,电流会变化,这时体现到的就是电感的平均电流变化,在图6.18中,波形上下整体移动,电路纹波大小的幅度不会变化。
图 6.18 电感感值变小导致纹波电流变大曲线
在电路正常工作过程中,如果电感电流的最小值大于0,也就是电感处于一个持续输出电流的稳态,只不过有一个纹波的规律性波动,则此时就是一个CCM模式,如图6.17所示,为保证电流连续,电感电流应满足:
(1)当时,Boost电路工作在连续导通模式(CCM)。
(2)当时,Boost电路工作在临界导通模式(BCM) 。
(3)当时,Boost电路工作在非连续导通模式(DCM) 。
1.CCM模式
CCM模式下电感电流的波形,如图6.19所示。
图 6.19 CCM模式下Boost电路的电感电流曲线
当开关管(MOSFET)为导通状态,二极管D处于截止状态,流经电感L和开关管的电流逐渐增大,电感L两端的电压为V in,考虑到MOSFET的S极对公共端的导通压降Vs,即为Vi-Vs。ton时,通过L的电流增加部分ILon。升压变换器 CCM/DCM 边界条件 Boost 在 CCM/DCM 的边界情况,是指开关截止期间电感电流从最大值正好减小到零,电流值一旦为零下一个开关周期便开始了。此时,电感电流平均值可表示为:
开关管导通时的压降Vds(on)和线路上其他电阻或者走线的的压降,我们可以忽略不计。
当开关管截止,二极管D处于导通状态,储存在电感L中的能量提供给输出,流经电感L和二极管D的电流处于减少状态,设二极管D的正向电压为Vf,开关管截止时,电感L两端的电压为Vout+Vf-Vin,电流的减少部分△ILoff满足下式。
Vf为整流二极管正向压降,快恢复二极管约0.8V,肖特基二极管约0.5V。
在电路稳定状态下,总的电流保持稳定。则电感在开关管开关的两个时间的变化量相同,有:
在电感选型的时候,满足这个值,则电源始终保持在CCM模式。
2.BCM
跟Buck电路一样,BCM是一种临界态,相当于电感正好出现流经电流为0的情况。BCM就是CCM-DCM临界模式。本质BCM更像CCM的一种特殊情况,波形也是跟CCM一样是一个稳态,如图6.20。
图 6.20 BCM模式下Boost电路的电感电流曲线
3.DCM
在开关关闭之后,电感处于一个释放能量的装填。电感的电流在继续放电的过程中,一旦到达0之后,没有能量继续释放,会继续保持0,此时输出电流就依赖输出电容进行维持,此时电感的电流如图6.21所示。
图 6.21 DCM模式下Boost电路的电感电流曲线
实际测试到的波形如图6.22中的曲线所示。
图 6.22 DCM模式下Boost电路的电感的实测波形
反极性Buck/Boost 变换器主电路的元件由开关管、二极管、电感、电容等构成。输出电压的极性与输入电压相反。Buck/Boost 变换器也有电感电流连续和断续两种工作方式。
反极性Buck/Boost也可以分为同步和非同步两种控制器。如图7.9所示,左图为非同步控制器,是由开关管Q1、二极管D1、电感L组成拓扑;右图为同步控制器,由Q2替代D1实现。
图 7.9 反极性Buck/Boost的非同步控制器和同步控制器
通过控制 Q1 与 Q2 的导通关断时间,对储能元件电感 L 与输出电容 Cout进行充放电,产生稳定的直流输出电压 Vout。其中 VIN为电源输入电压,Q1 为主开关功率管, 一般用 MOSFET,D1 为续流二极管,也可以用一个开关管Q2来代替。
工作过程一般包含充电阶段和续流阶段。详细的工作原理为,当系统稳定时,若 Q1 导通、Q2关断(或者D1反向截止)时,输入电压 VIN给电感 L 充电,电流的方向为顺时针,此时电能转化为电感磁能,能量储存于电感上,此时电感电流随着 Q1导通时间的增加而增大;电感储能的同时,输出电容 Cout与负载 RL构成回路,上一阶段电容 Cout存储的能量释放给负载电阻 RL,提供所需的能量,电流方向为逆时针,输出电压为负值,输出电压的绝对值随着充电阶段的时间的增加而下降,该过程称为环路的充电阶段。
若 Q1 关断、Q2 导通(或者D1正向导通)时,此时电感电流在上一充电阶段储存的磁能,由电感 L、输出电容 Cout、负载 RL和开关管Q2(或者二极管D1续流)构成的回路进行释放,此时电感磁能转化成电能,电感电流随着 Q2 导通时间的增加而减小,一部分用于 Cout充电,进行储能,另一部分用于为负载RL提供电流,由于电感上的电流不能突变的特性,所以电流方向为逆时针,输出电压也为负值,输出电压的绝对值随着续流阶段的时间的增加而上升,该过程称为续流阶段。
根据 反极性Buck/boost 的工作原理可知,电感电流在充电阶段是连续上升的,在续流阶段是连续下降的,而根据电感电流在续流阶段是否降为零,分为连续导通模式(CCM)与非连续导通模式(DCM)。
1.连续导通模式(CCM)
连续导通模式是电感电流在续流阶段不为零,而在大负载电流情况下易为 CCM 模式。其工作原理如图7.10所示。
图 7.10 反极性Buck-Boost的CCM模式工作原理
由图所示为,在每个周期内,当主开关管 Q1 导通,D1反向截止时,输入电压 VIN通过 Q1 给电感充电,电感电流持续增大,此时 L的电压值被拉高约为 VIN(正值)。当开关管Q1 关断,由于D1左侧的电压为VIN,右侧为负值Vout,则D1为反向截止,电感电流给电容 Cout与负载 RL提供能量,电感电流在持续减小, 此时 L的电压值为Vout(负值)。所以 L的值与电感电流的值都是在周期性变换的,信号上电的波形图如图7.11所示。
图 7.11 反极性Buck/Boost的CCM模式电感的电压和电流图
当工作在 CCM 模式下,每个周期内都有包含完整的充电阶段和放电阶段。ΔIL为电感电流纹波,Iavg电感电流平均值。
2.非连续导通模式(DCM)
当 Iout>0.5ΔIL时,工作在 CCM 模式下,当 Iout<0.5ΔI时,工作在DCM模式,当 Iout=0.5ΔIL时,工作在临界模式。故当负载电流过小时,电路容易工作在 DCM 模式下。此时有一个阶段电感上电流为0,电压也为0,如图7.12所示。
图 7.12 反极性Buck/Boost的DCM模式电感的电压和电流图
工作工作在 DCM 模式下是,一个有三个状态:充电阶段、放电阶段 和电感电流为零阶段,这三阶段在一个周期内的时间分别为 T1、T2、T3。充电阶段的占空比为 D1,放电阶段的占空比为 D2。在T3期间, Q1关断 和 D1截止, 电感电流为零,负载由输出滤波电容供电。
根据能量守恒定律,在不考虑电感的寄生阻抗,以及 MOS 管的导通压降下等的理想情况下,电感电流在充电阶段与放电阶段的变化量是相等的。
不考虑损耗,输入功率等于输出功率,考虑输出的是负压,输入电流与输入电压的乘积等于输出电流和输出电压的乘积,则有:
此时根据输出电流Iout与电感电流平均值ΔIL/2的关系可得表达式为,电感放出的电量总和(电感电流变化量ΔIL除以2得到平均电流再乘以放电的时间T*D2)等于电源输出的电量总和(输出电流Iout乘以一个周期的时间T):














